ホーム > 製品一覧 > 高精度自動ステージ(位置決めステージ) > コントローラ > ドライバ内蔵型3軸コントローラ CP-700D

コントローラ





ドライバ内蔵型3軸コントローラ CP-700D

ポジションコントローラCP-700Dは3軸ドライバ内蔵のパルスモータコントローラです。直線補間機能、高精度補間、ヘリカル駆動、デイジーチェーン機能等により、高速・高精度・多軸の位置決め制御システムを簡単に構築することができます。パソコンとUSB接続によるダイレクトドライブ、内部メモリや市販USBメモリへ登録したプログラムによる独立運転、外部機器との連動運転など多様な制御が可能です。

パラメータ設定・プログラム作成ツールソフト CP700TOOL
汎用ポジションコントローラCP-700シリーズに添付のソフトウェア「CP700TOOL」は、パソコンから簡単にパラメータ設定やプログラム作成ができます。
便利機能1 簡単プログラム作成
NC言語(Gコード)に準拠したコードを入力するだけで、直線や円弧補間等様々なプログラムが簡単に作成できます。
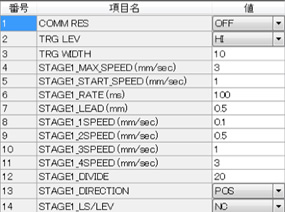
内部パラメーターの設定
・原点検出方式、最高速度や加速度など各種パラメータを自由に設定することができます。

運転プログラムの作成、編集
・NCコード(Gコード)に近似した簡単なプログラム言語にて、プログラムの作成や編集が行えます。
・3軸直線補間、2軸円弧補間、ヘリカル動作などの他、I/O制御、移動速度設定、ウェイト時間設定の設定も可能です。
・内部メモリには16プログラム5万ステップを保存可能。USBメモリを使用した場合600万ステップの保存が可能です。
・データはCSV形式のため、Excelで編集することも可能です。
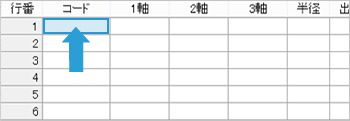
1.入力したいコードのセルでスペースキーを押すと、コードの説明の補助画面が表示されます。<新機能>
※プログラム作成方法は、コード欄に直接コードを入力するほか、コード内容の説明がわかる補助ガイドがあるので調べる必要がなく、選んだコードをそのまま書込みできます。

- 2.使用したいコードを選択します。
- 3.選択したセルにコードが書き込まれます。
プログラム例
| 行番号 | コード | X | Y | Z | 半径 | 出力 | 移動速度 | ウェイト時間 |
|---|---|---|---|---|---|---|---|---|
| 1 | G91 | |||||||
| 2 | G01 | 10 | 10 | 5 | 1 | 20 | 3000 | |
| 3 | G01 | 100 | 100 | 80 | 2 | 30 | 1000 |
1.相対座標の指定
2.速度20mm/secでX(10mm)Y(10mm)Z(5mm)移動し3秒停止、I/Oの1番を出力
3.速度30mm/secでX(100mm)Y(100mm)Z(80mm)移動し1秒停止、I/Oの2番を出力
PCダイレクト通信制御
・PCと3軸コントローラをUSBで常時接続して、コマンドの送受信により制御を行う事もできます。
<コマンド例>
送信 A:1+P5000
絶対座標位置を指定するコマンド
受信 G:
移動開始命令コマンド
送信 Q3
速度設定値問合せコマンド
受信 Q3:S500F5000R10
現在の設定速度の回答
便利機能2 Excelでプログラム作成、編集が可能<新機能>
Excelでプログラムを作成したり、CP700TOOLで作成したプログラムをExcelで編集することが出来ます。 保存したプログラムをCP-700の内部メモリへ書き込めば、そのまま運転が可能です。
便利機能3 簡単な命令で3軸の補間動作が可能
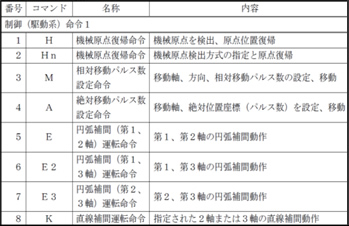
コードを選ぶだけで3軸の補間動作をさせる事ができます。
・G01 直線補間 各軸が指定された位置へ指定された速度で同時に 移動開始、終了をします。
| コード | 1軸目 | 2軸目 | 3軸目 | 半径 | 出力 | 速度 | wait |
|---|---|---|---|---|---|---|---|
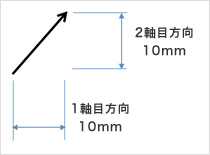
| G01 | 10 | 10 | 20 |
・上記プログラムでは、1軸目10mm、2軸目10mmの距離を20mm/secで直線補間動作します。
・左記のように各軸を補間動作しながら斜めに動作します。
・G02 円弧補間(時計回り)
・G03 円弧補間(反時計回り)
2軸を使用しての円弧補間動作や、3軸でのヘリカル動作が行えます。
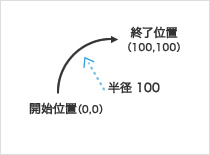
半径指定での円弧補間(時計回り)
| コード | 1軸目 | 2軸目 | 3軸目 | 半径 | 出力 | 速度 | wait |
|---|---|---|---|---|---|---|---|
| G02 | 100 | 100 | 100 | 10 |
・上記のプログラムでは、1軸目、2軸目の開始位置(0,0)から終了位置(100,100)まで移動速度10mm/secで半径100mmの90°の円弧補間を行います。
中心指定での円弧補間(時計回り)

| コード | 1軸目 | 2軸目 | 3軸目 | 半径 | 出力 | 速度 | wait |
|---|---|---|---|---|---|---|---|
| G02 | 0 | 0 | 100 | 10 |
・上記のプログラムでは、1軸目、2軸目の開始位置(0,0)から終了位置(100,100)まで移動速度10mm/secで半径100mmの90°の円弧補間を行います。
ヘリカル動作
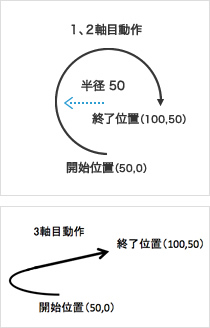
| コード | 1軸目 | 2軸目 | 3軸目 | 半径 | 出力 | 速度 | wait |
|---|---|---|---|---|---|---|---|
| G02 | 100 | 50 | H50 | I0J50 | 10 |
・上記プログラムでは、1軸目、2軸目が中心位置(0,50)として、開始位置(50,0)、移動速度10mm/secで半径50mmの円弧補間動作中に3軸目が50mm移動します。